|
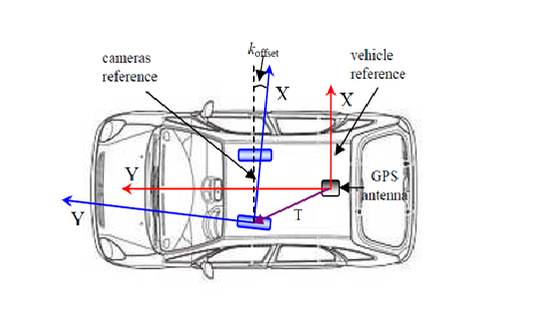
Calibration is the process of compensation for the misalignment between the imaging system and the navigation system (GPS/IMU). The misalignment involves both translation and rotation components between the cameras and the mapping reference system, as well as the synchronization between them.
System calibration is performed using the standard procedure: Camera Calibration (Interior Orientation), Camera and position system Calibration (Exterior orientation), Camera and positioning system synchronization. All specific tasks are completed using state-of-the-art algorithms and systems; all proposed methods are currently implemented in a several software components, which are to be integrated during the MOBILO’s progress. |

Chessboard images aquisation
For the interior and relative orientation the user needs to acquire stereo pairs of a calibration checkboard of known dimensions. The calibration dataset must consist of several stereopairs. User must capture images of a checkboard while another person rotates it at several positions. The users must ensure that the checkboard covers as much of the images as possible in every capture.
|

interior and relative orientation
Captured single and stereo images are imported into the MobiloCalibration software component which is capable of performing all necessary actions needed for determining the interior and relative system's orientation
|

initial resection
In order to determine the translation and rotation values required to transform the data from the imaging reference system to a global frame, it is important to determine the relationship between physical locations of the origins of the stereo ring and the GPS/INS.
This is achieved by an initial resection (pose estimation) performed using a small control field with predefined points, collecting at the same time the INS and GPS provided measures. |

